Discover what is sensor fusion technology in our 2026 guide. Learn the intricate algorithms behind it and its real-world applications today!

What Is Sensor Fusion Technology? A 2026 Guide

TL;DR:
- Sensor fusion combines measurements from multiple sensors using probabilistic algorithms to create accurate environmental representations. It relies on proper calibration, temporal alignment, and noise modeling to ensure reliable, real-time estimates. The most common architectures in production are feature-level fusion, balancing accuracy and bandwidth, used across industries like autonomous vehicles, robotics, and smart infrastructure.
Most professionals assume sensor fusion means averaging readings from multiple sensors and calling it done. It doesn't. Sensor fusion is the algorithmic process of combining measurements from multiple sensors to produce a unified, low-uncertainty representation of the environment. The real work happens in probabilistic state estimation, temporal alignment, and noise modeling. This article breaks down how sensor fusion works at the algorithmic level, explains the three architectural approaches you will encounter in production systems, walks through real pipeline challenges, and maps the technology across its most significant applications today.
Table of Contents
- Key takeaways
- What is sensor fusion technology: the core principles
- Fusion architecture levels and their tradeoffs
- Building a reliable sensor fusion pipeline
- Sensor fusion applications and benefits across industries
- Future trends in sensor fusion research
- My perspective: what production actually teaches you
- How Beyondsensor puts sensor fusion to work
- FAQ
Key takeaways
| Point | Details |
|---|---|
| Fusion is not simple averaging | Sensor fusion performs probabilistic state estimation under uncertainty, not basic data aggregation. |
| Architecture choice drives tradeoffs | Data-level, feature-level, and decision-level fusion each carry distinct accuracy, bandwidth, and latency tradeoffs. |
| Calibration trumps algorithms | Timing misalignment and poor calibration cause more production failures than algorithmic complexity ever does. |
| Cross-industry applicability | Sensor fusion applications span autonomous vehicles, robotics, smart buildings, smartphones, and environmental monitoring. |
| AI is reshaping the field | Deep learning-based mid-fusion methods now achieve high accuracy with fewer sensors on embedded hardware. |
What is sensor fusion technology: the core principles
Sensor fusion is fundamentally a state-estimation problem under uncertainty, propagating probabilistic belief through time rather than mere data concatenation. Every real sensor produces noisy, incomplete observations. Fusion algorithms model that noise explicitly and produce a statistical estimate of the true system state, along with a confidence measure for that estimate. That confidence measure is what separates fused output from raw sensor data.
The dominant mathematical framework is the Kalman filter family. A standard Kalman filter blends a physics-based prediction with an incoming sensor measurement, weighting each by its estimated uncertainty. In practice, most systems are nonlinear, which is why Kalman variants like EKF and UKF are standard. The Extended Kalman Filter (EKF) linearizes the system model at each time step, while the Unscented Kalman Filter (UKF) uses carefully chosen sample points to propagate the full distribution, handling stronger nonlinearities at higher computational cost.
For scenarios where probability distributions are non-Gaussian or multimodal, particle filters provide an alternative. They represent the state distribution as a cloud of weighted samples, updated recursively as new measurements arrive. Bayesian inference provides the unifying theoretical language for all these approaches: every observation updates prior beliefs according to Bayes' theorem.
Key algorithmic concerns that shape any fusion system include:
- Noise characterization: Each sensor's noise covariance must be accurately modeled before fusion can be reliable. Underestimating noise leads to overconfident, diverging estimates.
- Temporal alignment: Measurements arriving at different rates and with different latencies must be time-stamped and synchronized before fusing. Misalignment corrupts correlation estimates.
- Spatial registration: Sensors mounted at different positions and orientations require precise extrinsic calibration to map their data into a common reference frame.
- Data association: In multi-object environments, the system must determine which sensor measurement corresponds to which tracked object before updating state estimates.
Pro Tip: Do not assume a more complex filter automatically gives better results. An EKF with accurate noise models often outperforms a UKF with poorly tuned covariances. Get the noise characterization right before upgrading the algorithm.
Fusion architecture levels and their tradeoffs
Not all sensor fusion happens at the same stage of the processing pipeline. The three architectural levels define where data from different sensors gets combined, and that decision drives the system's bandwidth demands, latency, and information fidelity.
| Architecture | Description | Bandwidth demand | Information retention | Typical use case |
|---|---|---|---|---|
| Data-level (early) fusion | Raw sensor streams merged before feature extraction | Very high | Maximum | Medical imaging, radar-camera arrays |
| Feature-level (mid) fusion | Feature vectors extracted per sensor, then combined | Moderate | High | Autonomous vehicle ADAS, robotics |
| Decision-level (late) fusion | Each sensor produces independent decisions, then voted on | Low | Reduced | Modular safety systems, distributed sensing |
Feature-level fusion dominates production ADAS systems in the 2020s for a practical reason. Data-level fusion is bandwidth-intensive. Feeding raw LiDAR point clouds and raw camera frames simultaneously into a single processing stage demands enormous compute and memory bandwidth, which is problematic for real-time embedded platforms. Decision-level fusion, while modular and easy to debug, discards the cross-sensor correlations that mid-fusion preserves. Feature-level fusion strikes the balance: each sensor processes its own data into compact feature representations, which are then fused to leverage inter-sensor dependencies.
Consider a common LiDAR-camera pairing in an autonomous vehicle. LiDAR provides accurate depth and 3D geometry with no color information. A camera provides dense texture and color but poor depth beyond a few meters. At the feature level, bounding box proposals from the camera combine with 3D cluster geometry from LiDAR into a joint feature vector before a shared classification head makes the final object call. Neither sensor alone can reliably classify a partially occluded pedestrian at 40 meters. Together, they can.

GPS-IMU fusion offers another instructive example. GNSS combined with IMU using EKF variants is standard in navigation. GPS gives an absolute but low-rate, drift-free position fix. The IMU delivers high-rate motion updates that drift over time. The EKF fuses them continuously, using GPS to correct IMU drift while the IMU fills the temporal gaps between GPS updates. The result is a smooth, high-frequency, low-drift navigation solution that neither sensor can achieve independently.
Pro Tip: Feature-level fusion is favored in automotive ADAS because it preserves cross-sensor correlations that decision-level fusion loses. If your architecture must support real-time operation on embedded hardware, mid-fusion is nearly always the right starting point.
Building a reliable sensor fusion pipeline
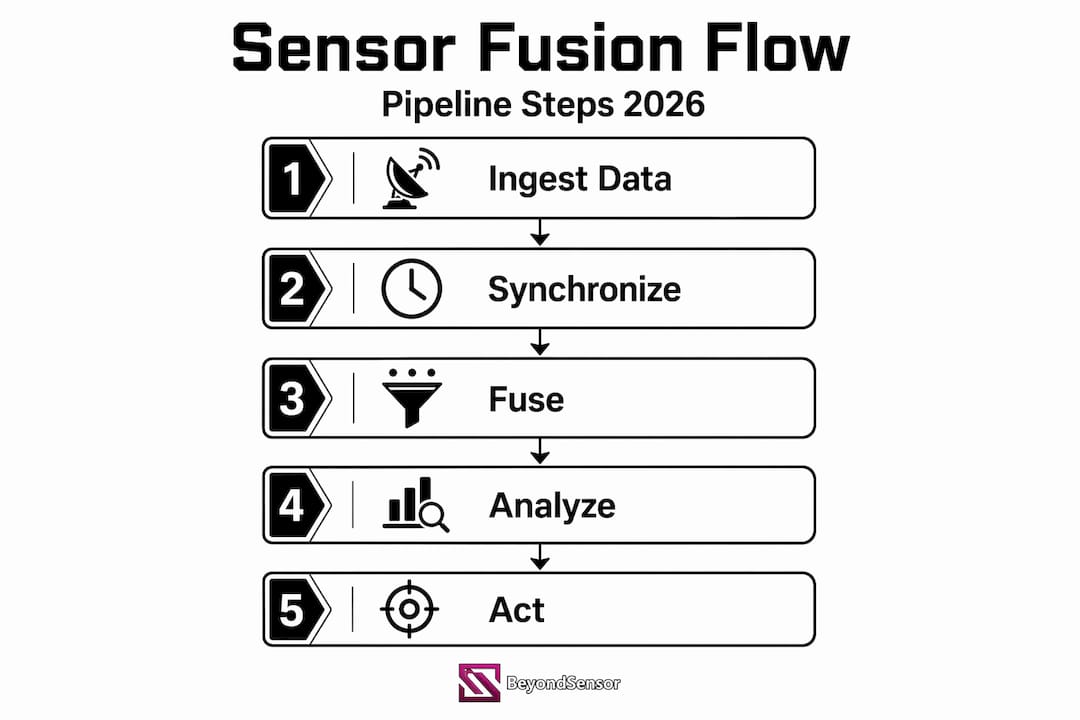
Understanding how sensor fusion works in theory is straightforward. Getting it to work reliably in a production system is a separate, harder problem. A canonical sensor fusion pipeline moves through four stages: preprocessing and calibration, temporal alignment, state estimation with object association, and output with uncertainty quantification.
Here is how each stage breaks down in practice:
- Preprocessing and calibration: Raw sensor data is filtered for outliers and transformed into a common coordinate frame. Extrinsic calibration — the spatial relationships between sensors — must be determined offline and verified periodically. Intrinsic calibration corrects for individual sensor distortions.
- Temporal alignment: Each sensor measurement carries a timestamp. Hardware timestamping at the sensor interface is the most reliable method. Software timestamping introduces variable latency from OS scheduling, which becomes a significant error source at high speeds. Timing synchronization quality is often the primary source of fusion failure in production deployments.
- State estimation and object association: Filtered, aligned data feeds into the estimation layer. For ego-state estimation, Kalman-family filters handle the fused prediction-update cycle. For multi-object tracking, probabilistic data association methods match incoming measurements to existing tracks.
- Output and uncertainty quantification: Every fused state estimate carries a covariance matrix describing its uncertainty. Downstream systems must consume this uncertainty, not just the point estimate, to make safe decisions.
Multi-modal sensor fusion in robotics reduces unexpected stoppages by 30 to 45% when calibration and synchronization are handled correctly. That figure is achievable only when the pipeline treats sensor faults as first-class failures. Outlier rejection, sensor health monitoring, and graceful degradation modes are not optional extras. They are part of the fusion architecture. A canonical fusion pipeline that lacks fault handling will fail in production under any sensor degradation scenario.
Pro Tip: Treat sensor fusion as an end-to-end data pipeline: ingest, synchronize, fuse, understand, plan, act, verify. If you skip uncertainty propagation at the output stage, downstream planners make decisions without knowing how much to trust the fused estimate. That is where unexpected failures originate.
Sensor fusion applications and benefits across industries
The practical reach of sensor fusion technology extends well beyond autonomous vehicles. The same algorithmic foundations power a wide range of deployments where single-sensor accuracy is insufficient.
Autonomous vehicles and ADAS: LiDAR, radar, cameras, and ultrasonic sensors fuse to produce a real-time 3D model of the vehicle's surroundings. Radar handles adverse weather where cameras and LiDAR degrade. Cameras provide lane marking and sign recognition. No single modality covers all conditions.
Sensor fusion in robotics: Industrial manipulators use force-torque sensors fused with joint encoders for precise control. Mobile robots combine wheel odometry, LiDAR, and cameras for simultaneous localization and mapping (SLAM). The sensor fusion applications in smart facilities extend this further, combining occupancy sensors, thermal imaging, and access control data to optimize safety and energy use.
Smartphones and consumer electronics: Your phone's screen rotation, step counting, and GPS navigation all rely on fusion of accelerometer, gyroscope, magnetometer, and barometric data. The orientation estimate you see is not a raw accelerometer reading. It is a fused state estimate running at over 100 Hz.
Industrial monitoring and predictive maintenance: Vibration sensors, temperature sensors, and acoustic emission sensors fuse their readings to detect early-stage bearing faults or motor degradation. A single vibration channel would generate too many false positives. Multi-sensor fusion correlates anomalies across modalities to confirm faults before they cause failures.
Environmental monitoring and smart infrastructure: Air quality stations combine particulate, gas, humidity, and temperature sensor streams. Fusion algorithms compensate for cross-sensitivities between gas sensors and atmospheric conditions, dramatically improving measurement accuracy compared to any single sensor type.
Benefits that appear consistently across all these sensor fusion applications include:
- Improved accuracy through statistical combination of complementary sensor strengths
- Fault tolerance and redundancy when one sensor fails or degrades
- Extended operational range across environmental conditions that defeat single-sensor systems
- Cost optimization by allowing lower-cost sensors to achieve accuracy previously requiring premium hardware
Future trends in sensor fusion research
The next wave of sensor fusion development is being shaped by three converging forces: deep learning, resource-constrained deployment, and multimodal resilience.
Deep learning fusion methods replace hand-engineered feature extraction with learned representations. Neural networks now handle the fusion step itself, learning optimal combination weights from training data. This enables fusion architectures that adapt to sensor degradation automatically rather than requiring manual reconfiguration.
Minimal sensor suites with mid-fusion: Recent research demonstrates mid-fusion approaches that achieve high accuracy using consumer-grade cameras and modest LiDAR setups, operating in real time on embedded platforms. This reduces hardware costs significantly and makes sensor fusion practical for a broader range of commercial deployments.
Hybrid multimodal localization: In GPS-denied, feature-poor environments such as underground facilities or dense urban canyons, UWB and IMU fusion outperforms purely optical approaches. Radio-frequency ranging combined with inertial measurement provides robust localization where LiDAR point clouds lack distinctive features.
Robustness under adverse conditions: Occlusion, rain, fog, and sensor aging all degrade individual sensor streams. Research is advancing fault-aware fusion architectures that explicitly model sensor health and adapt fusion weights dynamically, rather than assuming all sensors perform nominally.
The implication for practitioners: the field is moving away from fixed-weight, modality-agnostic fusion toward context-aware, adaptive architectures that treat sensor reliability as a dynamic variable.
My perspective: what production actually teaches you
I've spent considerable time working with sensor fusion in high-stakes systems, and the lesson that keeps proving itself is this: the mathematics of fusion is rarely where deployments fail. The hard parts of fusion lie in calibration and temporal alignment, not the elegance of the filter equations.
I've watched well-designed Kalman filter implementations produce garbage output because a single cable introduced a consistent 50-millisecond delay in one sensor stream. The filter had no way to know its assumptions about synchronization were violated. It proceeded confidently toward a wrong answer.
My practical advice: before selecting your fusion algorithm, define your timing architecture. Decide whether you will use hardware timestamping or software synchronization, and understand the latency distribution each introduces. Then characterize your sensor noise empirically in your target environment, not from a datasheet. Datasheets describe benign lab conditions.
For teams evaluating fusion strategies on new projects, start with the simplest architecture that meets your accuracy requirements. Feature-level fusion with an EKF is the right default for most real-time systems. Move to more complex approaches only when you have data showing the simpler method is the limiting factor. The teams I've seen struggle the most are those who reached for deep learning fusion before they had clean, calibrated, synchronized sensor data feeding into it.
— Eumir
How Beyondsensor puts sensor fusion to work
Sensor fusion is only as valuable as the system it powers. At Beyondsensor, we build sensor-driven security and operational solutions that translate fusion technology into real detection accuracy, real-time intelligence, and deployable infrastructure for system integrators and facility owners across Southeast Asia.
Whether you are integrating multi-sensor security systems for a complex facility or deploying scalable smart infrastructure across multiple sites, Beyondsensor's solutions for system integrators provide the technical depth and regional validation to get deployments right. Facility operators can explore our dedicated facility owner solutions to see how fused sensor data translates into actionable safety and operational intelligence. The technology is mature. The question is how well your deployment architecture uses it.
FAQ
What is sensor fusion technology in simple terms?
Sensor fusion is the process of combining data from multiple sensors using algorithms to produce a more accurate and reliable output than any single sensor can deliver alone. It uses probabilistic methods to model and reduce measurement uncertainty across the combined data streams.
How does sensor fusion work algorithmically?
Sensor fusion works by running measurements through algorithms such as Kalman filters, particle filters, or neural networks that weight each sensor's input by its estimated reliability, then produce a unified state estimate with quantified uncertainty. Temporal alignment and spatial calibration are prerequisites for these algorithms to function correctly.
What are the main types of sensor fusion architectures?
The three main types are data-level fusion (merging raw sensor streams), feature-level fusion (combining extracted features from each sensor), and decision-level fusion (voting across independent sensor decisions). Feature-level fusion is the most common choice in production autonomous systems due to its balance of information retention and computational efficiency.
What are the key benefits of sensor fusion?
The primary benefits include higher measurement accuracy, fault tolerance when individual sensors fail, extended operational range across adverse conditions, and the ability to use lower-cost sensors to achieve accuracy levels that previously required expensive hardware.
Where is sensor fusion used today?
Sensor fusion applications cover autonomous vehicles, industrial robotics, smartphones, environmental monitoring stations, smart building systems, and physical security infrastructure. Any system where a single sensor type cannot reliably cover all required operating conditions is a candidate for sensor fusion.
Recommended
- How sensor technology drives smarter industrial automation | News | BeyondSensor
- Sensor tech applications: Boost facility safety and efficiency | News | BeyondSensor
- Understanding advanced sensing: boost security and efficiency | News | BeyondSensor
- Top Sensor-Powered Security Innovations Leaders Should Know | News | BeyondSensor
Read More Articles

The Role of Sensors in Infrastructure: 2026 Guide
Discover the vital role of sensors in infrastructure for 2026. Learn how integration transforms data into predictive maintenance solutions!

Must-Have Industrial Security Features for Facilities
Discover the must-have industrial security features that protect your facilities. Enhance safety, ensure compliance, and mitigate risks today!

How to Evaluate Security Threats: A Practical Guide
Discover how to evaluate security threats effectively. This practical guide helps you prioritize risks and make informed decisions.

Why Scalable Security Solutions Matter for Modern Organizations
Discover why scalable security solutions are crucial for modern organizations. Uncover insights to enhance detection speed and reduce breach costs.
Let's Build YourSecurity Ecosystem.
Whether you're a System Integrator, Solution Provider, or an End-User looking for trusted advisory, our team is ready to help you navigate the BeyondSensor landscape.
Direct Advisory
Connect with our regional experts for tailored solutioning.